如今市面上已经有了许多不一样的人形机器人,涵盖了服务行业和医疗行业等所有的领域。这些机器人以其化和自动化的特性逐渐融入我们的日常生活和工作中。然而,尽管现有的人形机器人在特定应用场景中展现出了巨大的潜力,如何逐步提升其操作精度、适应性和多功能性,仍然是机器人技术发展的关键挑战。针对这一需求,本案例探讨了通过整合视觉系统与机械臂技术,来提升人形机器人在复杂环境中的自主操作能力,特别是在精确抓取和操作任务中的应用。
通过结合openc算法&STag标记码视觉系统和Mercury X1轮式人形机器人,实现对各种形状和大小的物品进行精准抓取,提高分拣效率和准确度,实现双手合作充分的发挥人形机器人的作用。
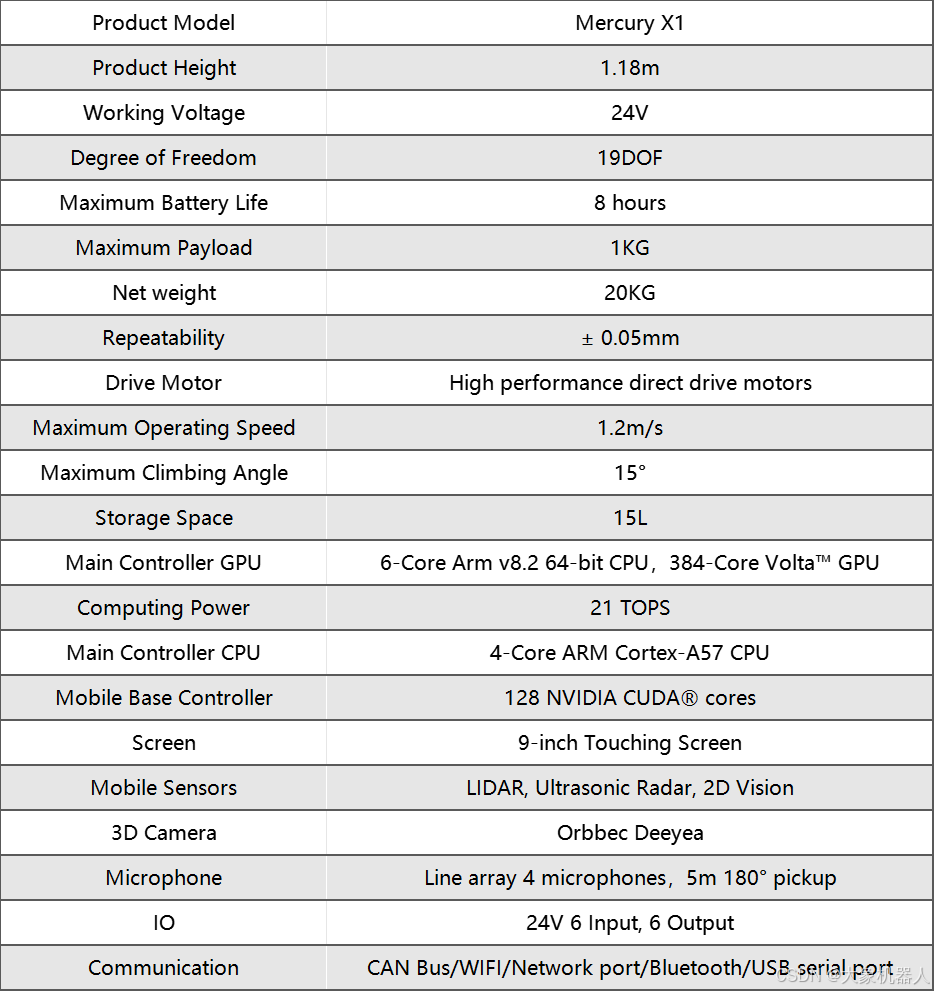
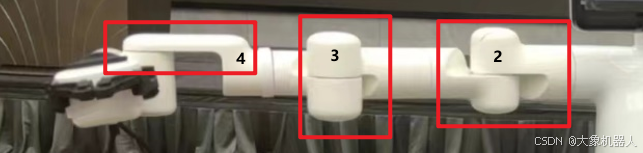
Mercury X1是由Elephant Robotics开发的一款先进的人形机器人,特别设计用于应对各种自动化任务。它拥有19个自由度,(单臂7个自由度)使其在执行任务时具有极高的灵活性和适应性。Mercury X1配备了轮式移动底座,由高性能直驱电机驱动,能够在复杂环境中稳定移动,并具备高达8小时的电池续航能力,适合个人和商业应用。
这款机器人采用高性能主控制器系统,配置了NVIDIA Jetson Xavier提供强大的计算支持,以处理视觉测距、传感器融合、定位与地图构建、障碍检测和路径规划等复杂算法。此外,Mercury X1的移动基座装备了LiDAR、超声波传感器和2D视觉系统,可以在一定程度上完成高感知的环境交互。
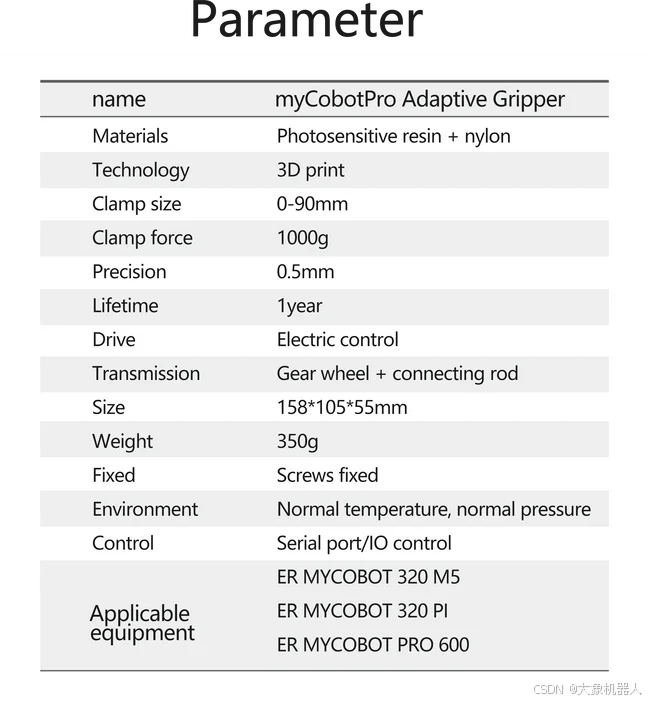
自适应夹爪,它可以拾起任何形状的任何物体并且不会松开。使用它来完成一系列完整的应用,并快速投入生产 - 无需机器人专业相关知识。它是高度灵活和可靠的机器人单元的关键。
接下来,我们将探讨这些技术在实际应用中是如何被集成到机器人中,并展示其在具体任务中的表现。
OpenCV是用于实现图像处理和计算机视觉的开源库,它在本次的案例中扮演了至关重要的角色,没有它就不能完成这一个项目。机器人的摄像头通过OpenCV分析收集到的视觉数据,识别和定位物体。OpenCV的算法使机器人能够识别物体形状、大小和精确坐标,这一些信息对于精确抓取和操作至关重要。
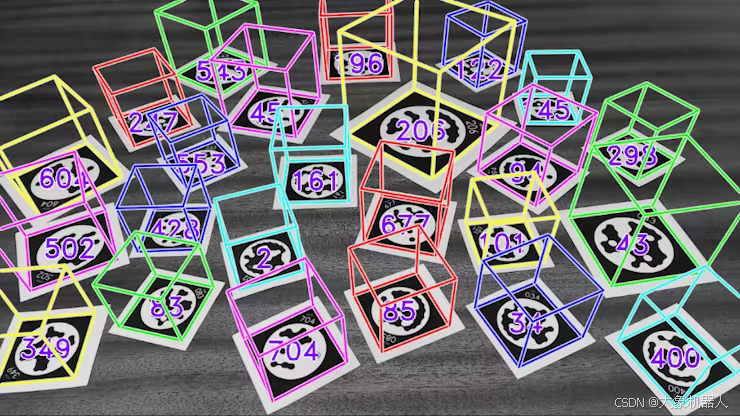
S-Tag标记码是一种高度可靠的标识系统,设计用于在视觉上挑战的环境中提供准确的标记识别。这些标记被用于标识Mercury X1机器人操作环境中的物体和位置。即使在光线不足或视线受阻的情况下,S-Tag也能确保机器人通过其摄像头系统准确识别目标物体。
通过这些技术的应用,Mercury X1大象人形机器人能够执行复杂的任务,如自主导航、物体识别和精确操控,这些都是现代自动化和智能系统不可或缺的能力。
pymycobot是用于控制Mercury X1机器人机械臂和末端执行器(如夹爪)的Python库。它允许开发者精确控制机械臂的角度、坐标以及运动模式,包括差补模式和刷新模式。此库为机器人提供了高度的灵活性和可定制性,使得机器人能够执行复杂的抓取和操控任务,并适应任何操作需求。
1)使用放松指令释放关节电机(注意!放松后需要扶住关节防止机械臂下坠损坏!)

如果在零位读取到的关节角度与[0, 0, 0, 0, 90, 0]相差很大,则需要校准关节零位
校准完毕后读取关节信息,返回为[0, 0, 0, 0, 90, 0]则表示校准成功
相机和夹爪的安装方法与视觉识别的手眼矩阵相对应,已经提前做好了一个关于Mercury X1 相机夹爪的手眼标定的数值,如果更改的话要重新进行手眼标定。

然后我们会使用到camera_detect 这个功能包,封装了一些关于相机使用的方法,接下来我会介绍一些接口,针对对STag码的识别,用起来非常的方便,不要自己再次进行手眼标定的计算了。
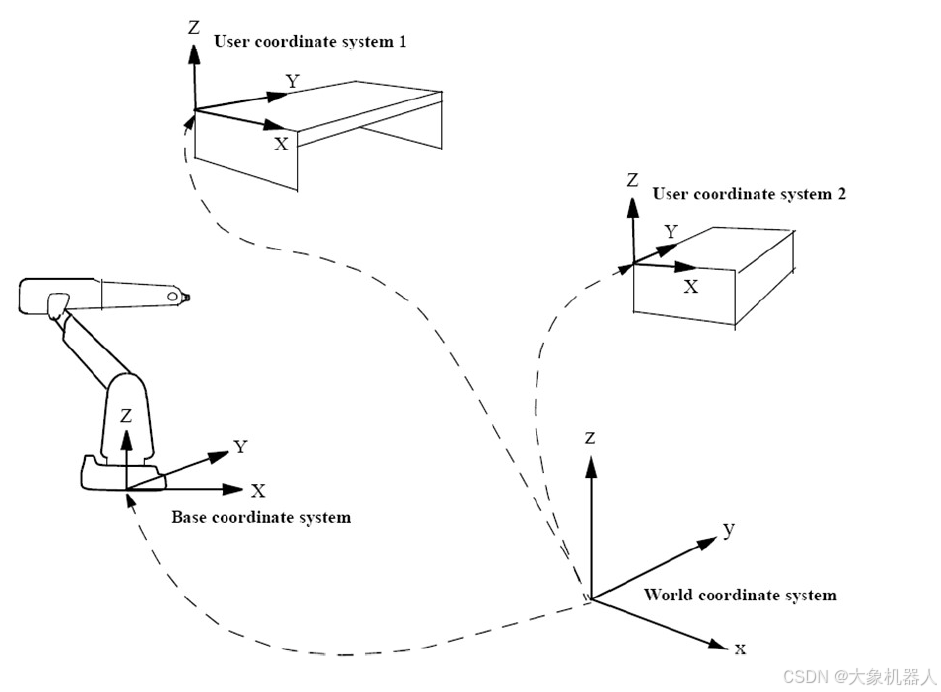
1数据采集:采集若干组手眼数据,包括机器人末端执行器在不同位置的姿态(即位置和方向)和相机看到的特征点的位姿。
2 建立运动方程:为了确定相机坐标系与机器人末端执行器坐标系之间的变换关系
3 求解变换矩阵 :得到的是描述相机坐标系和机器人末端执行器(手)坐标系之间的空间变换关系的值。
我们来控制机械臂的双臂,会使用到pymycobot库当中的Mercury,我们为了可以直观明了,每一条手臂控制的时候都需要创建一个对象。
如果拥有一台Mercury X1你会用他来做些什么呢?发挥他人形机器人最关键的特性,如果你有什么好的想法,想要实现的欢迎在下面进行留言和我们沟通,你的点赞和留言是对我们最大的支持!
在自动化办公领域的潜力,以及其在提升效率和减少人为错误方面的显著优势。 接下里跟随我们的脚步,我们先简单的介绍一下使用到的产品。 Product
建模的键盘点按操作! /
的感知传感器。这还在于原来的超声或红外传感器感知信息量有限,鲁棒性差,而
,这并不完全是高难度的工作,他们很快就会把披萨或咖啡送到你的工作场所或校园宿舍。随着餐厅向“全栈
食品配送服务”转变,一个企业可以负责所有的客户交互管理、烹饪和物流。所以很快就需要
系列 /
案例研究! /
发力新能源汽车和储能市场,威兆半导体推出新一代700V SiC MOSFET
YXC石英差分晶振,频点156.25mhz,LVPECL输出,应用于光模块
对PCB板进行通电,发现DC直流电源输出到PCB板上的电压一直是在6V左右,电压上不去,有大佬知道是什么原因吗
