跟着人工智能概念的逐步炽热,对应的各种运用工业也逐步开展起来,由于先天的优势,高校在人工智能教育方面必定走在前列,对应人工智能大的职业,无人设备和机器视觉是其间很重要的板块,为越来越好的推动高校教育,环绕该板块,卓翼智能教育体系规划了一个渠道计划。
体系结合现在抢手研讨范畴与研讨方向,集无人机、无人车、双目视觉、机载AI视觉处理板卡于一体,构成全套的无人渠道操控、通讯链路、视觉图画收集、图画辨认、三维重建、定位解算等算法研讨体系解决计划。为各科研团队、高校试验室供给硬件完善、功用彻底、开发环境完好、引领职业开展的全体系全功用开发测验环境,让各科研团队专心于slam导航避障算法研讨。一起供给完好全套。
该体系供给全套的学科教育课程以及示例算法等,可快速打开相关课程规划,进行实践教育运用阶段。教科书级专业辅导,永葆技能先进性。
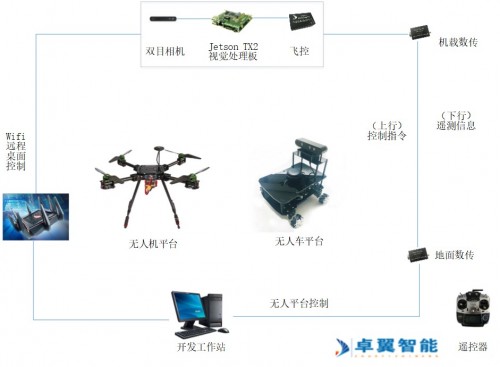
根据机器视觉无人渠道自主导航避障体系硬件由:开发工作站、无人渠道体系、机载双目视觉、机载图画处理板等组成。
开发工作站是体系开发试验操控渠道,大多数都用在双目视觉方针辨认练习体系开发运用,为前期视觉体系操控渠道,当在上位机中操控成功后即可以移植到TX2上进行实时自主操控。
无人渠道为专为根据机器视觉无人渠道自主导航避障体系研制的无人机或无人车渠道,飞翔操控安稳。可经过串口、USB接口、网络通讯等多种通讯操控接口操控。可搭载超声波、激光、光流GPS、RTK等许多传感器,习惯多种运用环境与体系组合。
机载双目视觉体系包含双目相机,实时收集无人机巡视拍照信息,发送至TX2机载处理板卡进行避障、跟从以及slam核算,或下传至地上图传接收机由开发工作站进行处理。
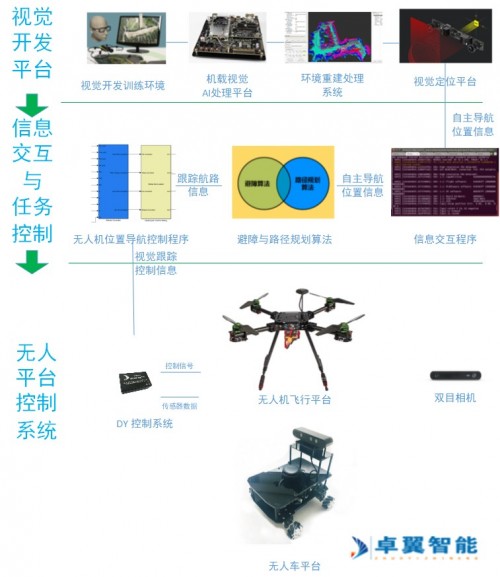
根据机器视觉无人渠道自主导航避障体系软件开发体系由视觉开发渠道、信息交互与使命操控渠道、无人机体系等组成。
经过立体匹配技能核算出二维图画的深度信息,一起运用视觉惯性交融技能估量相机本身的运动姿势,交融多帧深度信息,重建空间环境的体素地图。由地图获取障碍物间隔信息,生成可执行途径。
由视觉开发练习环境Jetson TX2 视觉处理开发体系等组成、视觉定位渠道、环境重建体系等组成。
根据机器视觉无人渠道自主导航避障体系硬件由:开发工作站、无人渠道体系、机载双目视觉、机载图画处理板等组成。
开发工作站是体系开发试验操控渠道,大多数都用在双目视觉方针辨认练习体系开发运用,为前期视觉体系操控渠道,当在上位机中操控成功后即可以移植到TX2上进行实时自主操控。
无人渠道为专为根据机器视觉无人渠道自主导航避障体系研制的无人机或无人车渠道,飞翔操控安稳。可经过串口、USB接口、网络通讯等多种通讯操控接口操控。可搭载超声波、激光、光流GPS、RTK等许多传感器,习惯多种运用环境与体系组合。
机载双目视觉体系包含双目相机,实时收集无人机巡视拍照信息,发送至TX2机载处理板卡进行避障、跟从以及slam核算,或下传至地上图传接收机由开发工作站进行处理。
选用小觅双目摄像头规范版,双目帧在硬件上同步。以60Hz的频率收集图画,分辨率到达752×480像素,如图2.2为小觅双方针准摄像头。内置六轴IMU传感器,频率能到达500Hz。双目基线mm。选用大局快门,可完成两个摄像头的一切像元一起曝光。在高速移动的拍照场景中,能大大下降图画畸变,供给更精准的图画源。
IMU 六轴传感器,IMU 与图画的同步精度高达0.05ms,为 SLAM 算法以及空间移动算法的研制供给数据校对;
IR 自动光,2颗IR自动光探测器发射的红外结构光,有用增强白墙和玻璃等物体的辨认精度,适用于彻底漆黑环境;
双目帧同步,供给两颗摄像头的硬件级帧同步,减小因图画不同步而导致的差错;
灰度镜头,供给明晰的是非视觉研讨图画源,分辨率为 752x480/60fps;
