发布时间:2024-08-06 22:50:29 人气: 来源:bob平台官网入口
龙睿是由深圳市视觉龙科技有限公司自主研发的一套可配置任务的综合视觉处理标准软件系统。它支持多款千兆网相机,检测任务自由配置,多任务、多工位检测;工具包覆盖定位、测量、检测、查找、逻辑判断,并支持字符串、多结果、并行输出和图像操作等,已经在多个视觉定位、尺寸测量、缺陷检验测试项目中应用。
机器视觉应用照明的作用第一是使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,从而易于特征的区分,第二是保持充足的亮度来排除外界光对视觉的干扰,来保证取图的稳定性。从以下两个方面选择光源。
光源的颜色:我们正真看到某个物体成某种颜色,是因为其反射了对应的光谱。我们拍摄物体时如果要将某种颜色打成白色,那么就得使用与此颜色相同或相似的光源(光的波长一样或接近),而如果要打成黑色,则要选择与目标颜色波长差较大的光源。由于本案例背景为蓝色、检测器械为白色需要把背景打成黑色,所以光源颜色选择红色,而且红色LED寿命长、稳定、价格低,更重要的是红色LED的波长更接近传感器的灵敏度峰值。
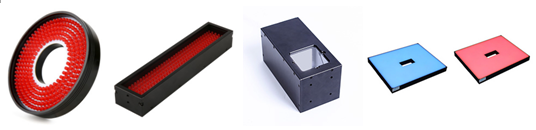
光源的形状:机器视觉常用的光源有环形光源、条形光源、背光源、同轴光源等,考虑到机构安装的方便和光照需要均匀照射,所以本案例选择中孔红色背光。
工业相机按成相色彩划分可分为黑白相机和彩色相机,按扫描方式划分可分为线阵相机和面阵相机,按芯片类型可划分为CCD相机和CMOS相机等。
相机选型首先应该明确项目需求,确定检验测试产品的精度要求,确定相机要看的视野大小,要确定检测物体的速度,同时确定是动态检测还是静态检测。其次确定硬件类型,选择相机数据传输接口:1394、Gige(千兆网)、USB,camera link。再根据与镜头的搭配选择正真适合的相机芯片尺寸(镜头的最大兼容芯片尺寸不小于相机的芯片尺寸)和与镜头的接口类型(C或CS)。视觉系统硬件的误差是不可避免的,一般都保证在一到两个像素之间的误差,所以通过计算公式:精度=视野(长或宽)÷相机像素(长或宽)例如:假设视野为100*60,精度要求0.1,考虑到硬件误差,一般选型时把精度做到0.05,那么相机长边的像素=100÷0.05=2000,短边像素60÷0.05=1200,那么只需要理论分辨率大于或等于2000*1200像素的相机就能够完全满足需求。
本项目根据视野、精度的关系选择分辨率为500(2500pix*2000pix)万、帧率为14帧、通讯接口为Gige(千兆网)、与镜头接口为C接口的相机。
在精密尺寸测量时一般考虑远心镜头。远心镜头最大的作用是为纠正传统工业镜头视差而设计,它可以在一定的物距范围内,使得到的图像放大倍率不会变化,它分为物方远心、像方远心和双侧远心,其中光学放大倍率=相机芯片尺寸/视场尺寸 =芯片(V)或(H)尺寸/视场(V)或(H),视野越大,放大倍率越小。正常的情况下,远心镜头都是有固定焦距和工作距离的,而且有些远心镜头体积大、比较重,所以要仔细地了解客户对视场大小、工作距离、空间限制、和运动控制的要求后才能确定要选择的镜头型号。
相机在垂直方向上能清晰成像的空间距离叫做景深。焦距越短,景深越大;光圈越小,景深越大;镜头离物体的距离越远,景深越大;相机芯片像元越大景深越大。
机器视觉镜头的最大兼容芯片尺寸必须大于或等于相机的芯片尺寸,否则会引起严重的畸变和相差。
机器视觉镜头接口和相机接口都分为C、CS、F和其他更大尺寸的接口类型。相机和镜头是互补的,即C接口的相机只能用C接口的镜头,CS接口的相机能用CS接口的镜头和加5mm接圈的C接口的镜头。
镜头焦距的选择根据公式焦距f = 工作距离 × CCD芯片尺寸( H or V) / FOV( H or V)来选择正真适合焦距的镜头。
本项目根据焦距的计算公式,选用焦距为8mm,接口为C口、最大兼容芯片尺寸为2/3的定焦镜头。
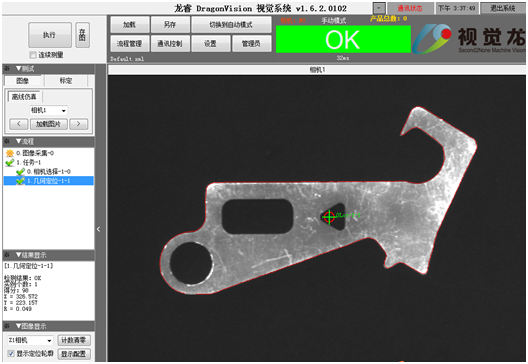
软件采用龙睿标准视觉软件进行缺陷检验测试任务,要求检测料盒内有没有医疗器械的缺失和错位。软件用到Blob Analyzer工具和Locator定位工具组合的方法来进行缺陷检验测试,其中Locator定位工具用来定位检测适合做模板的器械和限定Blob Analyzer工具的搜索框。Blob Analyzer工具用来检测较小的器械和一些局部缺失。最后用到评估工具对所用检测工具进行一次评估判断OK或NG后把结果发送给PLC进行处理。
Blob Analyzer 运用图像分割算法处理选择的矩形搜索框内的像素信息,能够准确的通过用户限定的条件来查找有效的Blob。
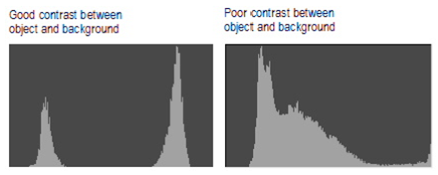
斑点表示由特定范围内的灰度值表征的图像内的特定区域。对于每个新图像Blob Analyzer会生成一个直方图,表示矩形搜索框内中的像素值分布,图像分割算法提供阈值功能,允许Blob Analyzer把图像的区域分成为两类:斑点和背景。
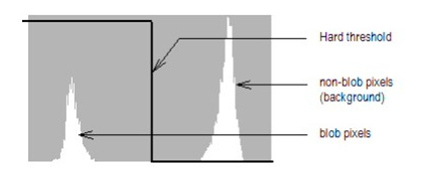
直方图提供了Blob Analyzer选择的矩形搜索框中所有像素值的分布,直方图的像素值范围为0(黑色)到255(白色)。很适合Blob检测的图像通常呈现双峰直方图,即具有两个尖点。
阈值用于将图像分割成两种像素,背景像素和斑点像素。根据所选择的分割模式,可以再一次进行选择一个或两个阈值,除此以外还有两种阈值函数,硬阈值和软阈值。
硬阈值也叫做二进制阈值,因为它将像素分成两种状态,背景像素为0,Blob像素为1.结果是二进制图像。
软阈值提供了处理边界斑点区域的像素的灵活性,软阈值覆盖一切像素值,一旦处理,阈值范围内的像素被输出为加权像素。加权像素用于与以其在阈值范围内的值相对应的的比例来计算斑点结果。软阈值内的值的范围是用户定义的,并且对应于最大和最小阈值之间的差值。
龙睿标准视觉软件界面友好、简单易操作。它除缺陷检验测试外还能够适用于颜色查找、有无判断、形态判断、识别检测、外观检测、3D在线检测、线扫检测、还可以定位、几何测量、智能学习、机器人引导等。
自主研发国产高精度光纤涂覆机(丙烯酸酯类)及全套相关附属产品(耗材、配件)与服务(维修及替换)
